Liufinback's homepage
Bookmark this to keep an eye on my project updates!

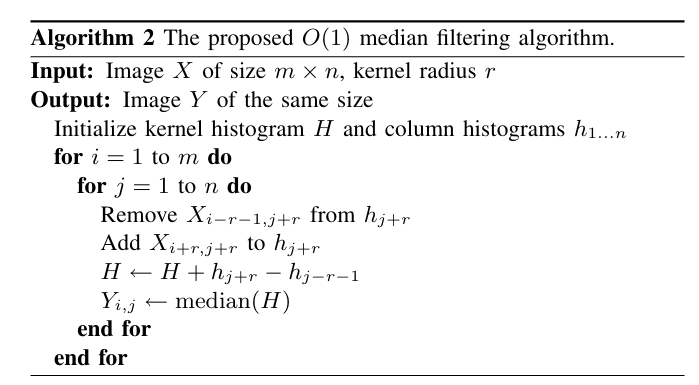
这个代码基于 astrometry.net/util/ctmf.c at main · dstndstn/astrometry.net 改的,原算法是Median Filtering in Constant Time,2007PerreaultHebert-tip2007.pdf的中值滤波算法。这里的修改添加了threshold参数,半径为r的局部中值与原像素点之差大于threshold就认为是坏点。cn是通道数的意思。
void ctmf(
const unsigned char* const src, unsigned char* const dst,
const int width, const int height,
const int src_step, const int dst_step,
const int r, const int cn, int threshold
) {
ctmf_helper(src, dst, width, height, src_step, dst_step, r, cn,
1, 1, threshold);
}
static void ctmf_helper(
const unsigned char* const src, unsigned char* const dst,
const int width, const int height,
const int src_step, const int dst_step,
const int r, const int cn,
const int pad_left, const int pad_right, int threshold
)
如下图所示算法主要是如下2步,一是从列直方图中去掉一个像素,加上下一个像素。二是从kernel直方图中去掉最左侧的列直方图,加上最右侧的列直方图。
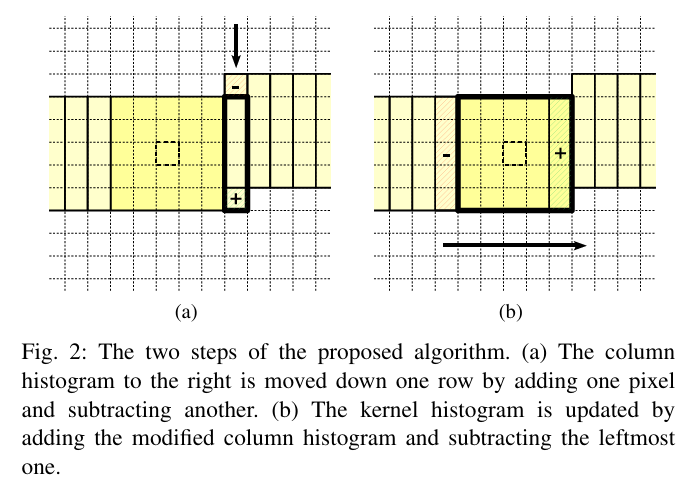
 算法对图中的每一列都维护一个直方图,这个直方图组在计算期间一直存在。通过上述的两步法就可以不断的更新kernel直方图,并获得中值滤波的结果了。
算法对图中的每一列都维护一个直方图,这个直方图组在计算期间一直存在。通过上述的两步法就可以不断的更新kernel直方图,并获得中值滤波的结果了。